Гидросистемы преобразовывают гидравлическую мощность в хорошо передаваемую, управляемую и распределяемую гидравлическую мощность для того, чтобы она снова превращалась обратно в гидроцилиндрах или в гидромоторах в механическую мощность.
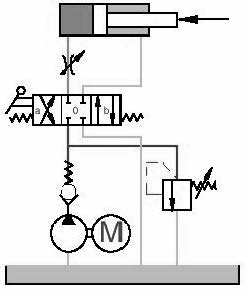
Гидросистемы открытого контура являются самым распространенным типом гидросистем малой и средней мощности. Они позволяют приводить от одного насоса большое количество гидроцилиндров и гидромоторов. Такой тип гидросистем незаменим для привода гидроцилиндров точного позиционирования [1]. Однако традиционный вид гидросистемы открытого контура с дроссельным управлением (рис.1) имеет ряд недостатков, основным из которых являются значительные потери энергии на дросселирование [2].
Если насос должен снабжать несколько потребителей с клапанным распределением, то при этом могут возникнуть при неблагоприятных рабочих условиях значительные теряемые мощности в форме потерь дросселирования, которые повлекут за собой нагревание среды. Такие рабочие состояния возникают в диапазонах парциальной нагрузки, т.е. тогда, когда насос подаёт больше масла, чем требуется для потребителя. Поэтому с точки зрения экономии энергии будет целесообразным, когда приводная мощность (объёмная подача насоса и давление) может согласовываться с потребностью. Эту задачу в принципе можно решить с помощью электронных систем управления. Однако в настоящее время они ещё дороги и несовершенны [3]. Поэтому наибольшее развитие получило гидравлическое решение этой задачи в двух вариантах LS и LUDV [4, 5].
Цель статьи - осветить основные принципы систем LS и LUDV, их отличие от традиционного дроссельного управления и вклад разработок фирмы Bosch Rexroth в их развитие.
Термин LS (load sensing – чувствующий нагрузку) применяется для
гидравлических систем, в которых мгновенное давление нагрузки служит сигналом обратной связи для управляющего устройства которое в свою очередь, устанавливает необходимое давление насоса.
Давление насоса поддерживается равным давлению нагрузки наиболее нагруженного потребителя плюс постоянное управляющее давление.
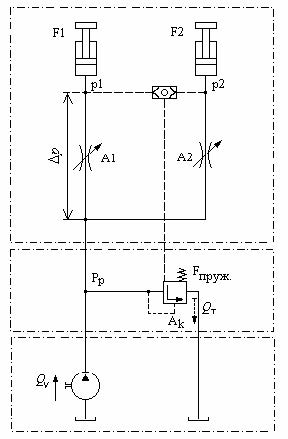
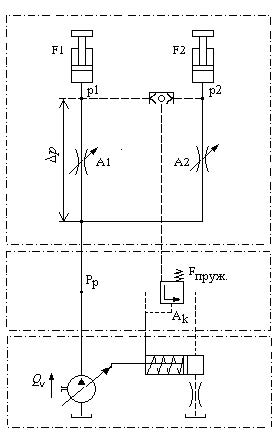
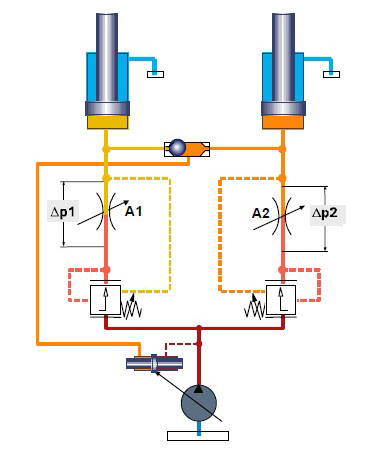
С помощью компенсаторов давления поддерживается постоянный перепад давления на дросселях А1 и А2, что и определяет отсутствие зависимости скорости потребителя от его нагрузки (рис. 9).
Это и является основным принципом LS-системы.
Система имеет хороший к.п.д. даже при частичных нагрузках, т.к. насос даёт расход и давление, определяемые реальной потребностью.
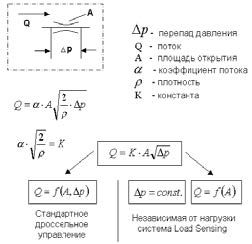
Поддерживается постоянный перепад давления на дросселе А (рис.2), что обеспечивает постоянную величину потока на исполнительном органе.
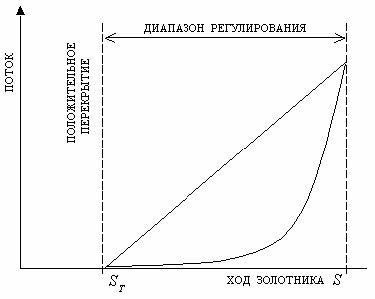
Кривая управления Q = f(s) LS системы (рис.3) показывает пропорциональную зависимость между ходом золотника и величиной потока.
В LS-системах падение давления через щель всегда поддерживается постоянным. Таким образом, существует пропорциональная зависимость между поперечным сечением открытия клапана А и потоком Q.
Гидросистема LS может быть выполнена в двух вариантах: с открытым центром и нерегулируемым насосом (рис.4) и закрытым центром и регулируемым насосом (рис.5)
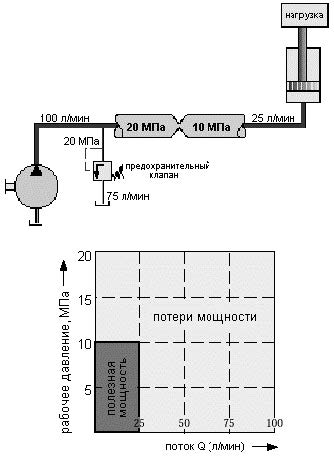
Сравним энергетический баланс трёх систем: стандартного
дроссельного управления с нерегулируемым насосом (рис.5), системы LS с
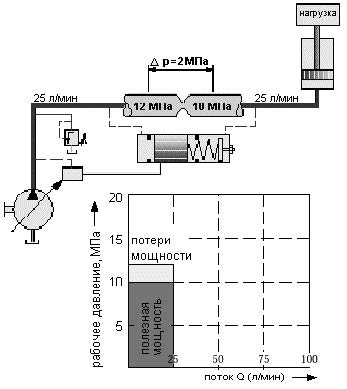
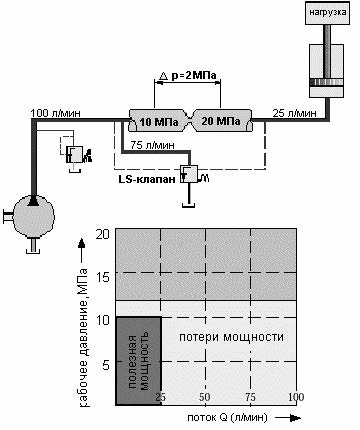
нерегулируемым насосом (рис.7), системы LS с регулируемым насосом
(рис.8). Посчитаем потребляемую мощность для каждого варианта при
полезной мощности:
Pпол = 25лит\мин х 10МПа /60 = 4.2 кВт
Стандартное дроссельное управление
Pпотр = 100лит\мин х 20МПа /60 = 33.4 кВт
Система LS с нерегулируемым насосом
Pпотр = 100лит\мин х 12МПа /60 = 20 кВт
Система LS с регулируемым насосом
Pпотр = 25лит\мин х 12МПа /60 = 5 кВт
Мы видим, что LS система с открытым центром и нерегулируемым насосом уже имеет заметные преимущества перед гидросхемой с открытым контуром и дроссельным регулированием. Но наибольшую экономию энергии обеспечивает LS система с закрытым центром и регулируемым насосом.
Машины, оснащённые такой гидросхемой, потребляют меньше топлива, меньше загрязняют окружающую среду. Компоненты гидросистемы имеют больший ресурс. Требуется отводить в атмосферу меньше тепла, сокращаются затраты на охладители масла. Обеспечиваются отличная управляемость в широком диапазоне параметров и распределение потока между потребителями, зависящее только от положения их золотников.
В основе принципа системы LS лежит независимость распределения расхода между потребителями от давлений нагрузки этих потребителей, реализованная с помощью компенсаторов давления, присоединённых перед переменными дросселями (щелями золотников).
Кроме того, применение вместо нескольких шестерёнчатых насосов одного регулируемого аксиально-поршневого, а также отсутствие необходимости иметь постоянно в гидросистеме максимальное рабочее давление позволяют повысить надёжность, срок службы и ремонтопригодность установленного гидрооборудования.
Система LS работает независимо от давления нагрузки до тех пор, пока
суммарный расход, проходящий через переменные дроссели, не достигнет
величины максимальной подачи насоса. Если при работе нескольких
потребителей необходимо пропустить к потребителям больший поток, чем
может обеспечить насос, то компенсатор каждого потребителя не может
обеспечить управляющий перепад давления (Δр) на золотнике этого
потребителя. Вследствие этого компенсатор давления открывается и в
распределении потока не участвует. Расход насоса больше не делится
пропорционально сечению дросселей, и поток направляется к потребителям
уже зависимо от давления нагрузки, предпочтительно к потребителям с
минимальным давлением нагрузки. Потребители с большим давлением
нагрузки снижают скорость вплоть до полной остановки.
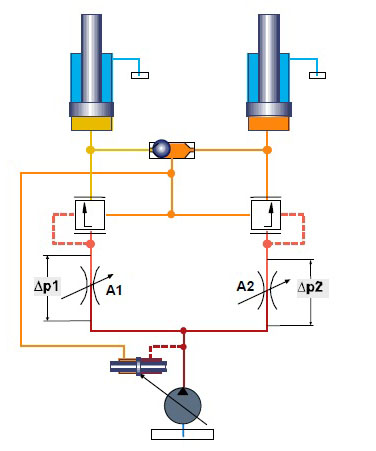
Поэтому в гидросистемах тракторов мощностью свыше 180 л.с. применяется система LUDV (независимое от нагрузки распределение потока), которая решает эту проблему. Как показано на принципиальной схеме (рис. 3), компенсаторы давления подключены после переменных дросселей и самое высокое давление наиболее нагруженного потребителя сообщается не только насосу, но и на компенсаторы давления остальных потребителей.
Перепад давления Δр (прибл. 20 бар), заданный регулятором
«давление/поток» на насосе, используется в качестве перепада давления,
управляющего системой. Насос обеспечивает подачу пропорционально
сечениям переменных дросселей А1 и А2. Перепады давления на переменных
дросселях (Δр1 и Δр2) равны между собой, т.к. управляющее давление всех
компенсаторов одно и тоже.
Если подачи насоса недостаточно, чтобы «заполнить» сечения
регулируемых дросселей для работы всех потребителей, то величина Δр1 и
Δр2 снижается. Благодаря самому большому оповестительному сигналу о
давлении нагрузки на все компенсаторы давления распределение расхода
происходит независимо от давления нагрузки пропорционально положениям
золотников.
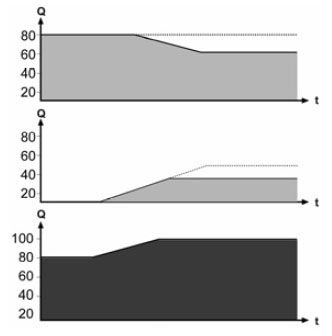
Пропорциональное деление подачи насоса для двух потребителей
показано на примере (рис.4). Если работает один потребитель с номинальным
расходом Q = 80 л/мин., то регулируемый насос обеспечивает ему требуемый
поток. Если начинает работать второй потребитель с QSoll=50 л/мин., то
максимальная подача насоса Q=100 л/мин. распределяется в соотношении
100/130=0,77 между двумя потребителями.
Система LUDV имеет практическое преимущество перед системой LS в гидросистемах машин, для которых важно сохранение синхронности движений при изменении их скорости. Примером может служить гидросистема экскаватора, манипулятора или подъёмного крана с гидроприводом. Также целесообразно применять систему LUDV для машин с большим количеством исполнительных механизмов при небольшой вероятности их совместной работы. В этом случае можно применить насос меньшей производительности, который тем не менее обеспечит работу любого количества одновременно работающих механизмов.
Многие компоненты гидросистем LS и LUDV имеют свои конструктивные особенности. Это насосы, распределители, приоритетные клапаны, рулевые устройства, тормозные системы и др. Широкую гамму такой продукции выпускает фирма Bosch Rexroth.
The modern hydraulic systems with open center based on LS and LUDV principles provide as well flexible & high-precision actuators' operation as low energy consumption thanks to considerable reduction of fluid throttling. The basic principles and regularities of LS and LUDV are shown in this item.